
RÖVIDEN AZ ARS-RŐL
Az automatizált adatgyűjtésre fejlesztett rádiótelemetriás rendszer (automated radiotelemetry system – ARS) különösen alkalmas rovarok, kis méretű emlősök és territóriumtartó madárfajok nyomkövetésére és monitorozására. A rendszer specialitása, hogy egyidejűleg több egyed folyamatos, távoli megfigyelését is lehetővé teszi.
A rendszer az egyedi igények szerint programozható, a megfigyelni kívánt egyedeken rögzített akár extrém kis tömegű (elemmel 0,16 g!) és nagyságú, nagy teljesítményű és hosszú élettartamú jeladókból, vevőegységekből és egy központi adatgyűjtő és -feldolgozó egységből áll. Minden egyes vevőegység egyidejűleg veszi a jeladók jeleit adatvesztesség nélkül, és továbbítja a jeladók jeleit a központi egységnek, ahol az adatok tárolódnak és további feldolgozásra kerülnek. Minden adat és rendszerstátusz információ elérhető online egy távoli számítógépen. Az utólagos adatfeldolgozás révén megbecsülhető a megfigyelt egyedek területhasználata, egy adott napszakra, időszakra, évszakra vonatkozó aktivitása, mozgásmintázata, az aktuális pozíciója, a mozgásmintázat változása vagy vizsgálható bármilyen, az adott kutatás szempontjából releváns összefüggés.
AZ ARS ELŐNYEI
GPS vs ARS
A legkisebb GPS jeladók tömege 1 g körül van, ezért vannak olyan állatfajok, amelyek nyomkövetésére egyáltalán nem alkalmazhatók. Az ARS rendszerben 0,16 g tömegű jeladók is készültek, így akár egy lepke vagy rovar is elbírja őket.
A kis tömegű GPS jeladók nem tudják továbbítani a jeleket, ezért ahhoz, hogy ki tudjuk olvasni belőle az adatokat, vissza kell fogni a megjelölt állatokat. Az ARS jeladók továbbítják a jeleket, és azok akár otthonról egy számítógépen folyamatosan elérhetőek, megjeleníthetőek.
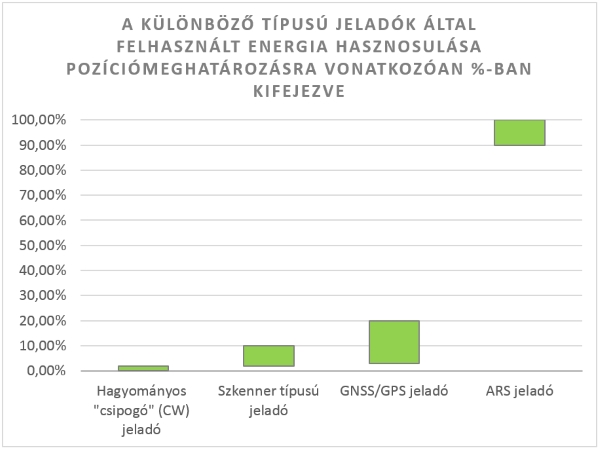
Egy GPS jeladónak beállítástól függően adott időszakonként adott számú próbálkozásra van szüksége ahhoz, hogy a GPS vevővel kapcsolatba kerüljön és adni tudjon, azaz adatot tudjunk belőle kinyerni. Ebből adódóan ha pl. a megfigyelni kívánt állat a föld alatt van vagy egy bokor alatt, és nem tud kapcsolatba lépni a vevővel, akkor is fogyaszt energiát, ami viszont nem hasznosul, mert nem lesz belőle (pozíció)adat. Az ARS rendszerben használt jeladók esetén viszont minden energia pozíciómeghatározásra hasznosul, amint azt az alábbi grafikon is mutatja, míg a GPS jeladók esetén ez nagyjából az ötöde, kb. 20 %. Másképp megfogalmazva: a megfigyelni kívánt állat által cipelt tömeg (azaz a jeladó tömege) a GPS jeladók esetén felesleges plusz tömeget és megterhelést jelent, mert jelentős része nem hasznosul a felhasznált energiának (márpedig több energiához nagyobb elemre, akkura van szükségünk), mert nem nyerünk belőle adatot.
Összehasonlításként: egy 2 g tömegű GPS jeladó maximálisan 10 pozícióadatot tud biztosítani, de azt nem képes továbbítani; egy 2 g tömegű ARS jeladó pedig 100.000 pozícióadatot ad és továbbít, amik távolról is elérhetők jelen idejűleg.
Kézi rádiótelemetriás, azaz tradícionális vevő vs ARS
Tradícionális, kézi vevő használata esetén csak akkor van adatunk a megfigyelt állatról, ha valaki aktuálisan éppen egy vevővel megkeresi a vizsgálati területen az állatot. Ennek a human erőforrás igényes megoldásnak az is hátránya, hogy egyszerre egy ember csak egy állatról képes adatot gyűjteni, és 50-100 jeladás és változó mennyiségű idő kell ahhoz, hogy az adott állat egyetlen, épp aktuális pozícióját meghatározzuk.
AZ ARS RENDSZER FELÉPÍTÉSE
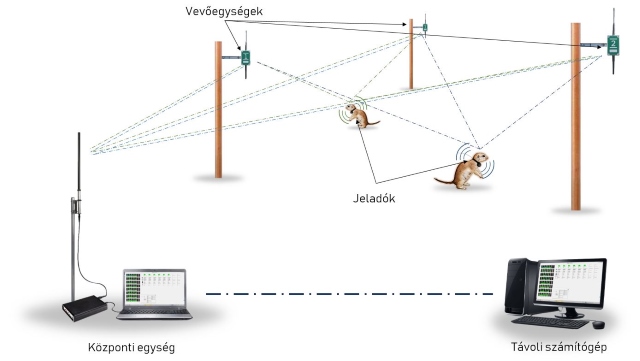
- A vizsgálati területen el kell helyezni a kis méretű és tömegű (1 kg alatti) vevőegységeket, amelyeket egy ember egyszerűen egy csavarral egy fához, oszlophoz rögzíthet. A vevőegységek akkumulátorról és napelemről is működnek, előbbi használata esetén az akkut 1-2 hetente cseréni kell. A kihelyezendő vevőegységek száma a terepviszonyoktól függ.
- Be kell kapcsolni a vevőegységeket.
- El kell helyezni valahol a központi egységet, amin az adatgyűjtő és megjelenítő szoftver fut, és be kell kapcsolni a PCt-t/noteboookot. Ha az adottságok olyanok, akkor ezt célszerű egy közeli épületben, kis védett helységben érdemes elhelyezni. ha erre nincs lehetőség, akkor a vevőegységek mellé felszerelhető egy-egy adatgyűjtő- és feldolgozó egység, amiből célszerűen hetente SD kártáyval lementhető a vett jeladók adatai.
- A rendszer máris üzemképes, és veszi a jeladóval felszerelt egyedek jeleit.
Vevőegység

Veszi és dekódolja a jeladók jelét, és elküldi a központi egység részére. Két fajtája van:
- RSSI alapú: ami a jeladók jelének erősségét méri,
- hibrid: a jelerősséget méri és emellett meghatározza az irányt is.
Áramellátása többféle módon lehetséges:
- napelemről,
- elemről/akkumulátorról.
Központi egység
Veszi a vevőegységek által már feldolgozott adatokat.
Tárolja és megjeleníti a vett adatokat egy erre a célra fejlesztett szoftver segítségével.
Internetkapcsolat esetén távoli számítógépről is elérhetőek a központi egységen tárolt és feldolgozott adatok.
Működtethető napelemről (kb. 200 W), hálózatról, akkumulátorról.
A megfigyelési területtől akár távol (10-20 km-re) is telepíthető a környezeti és domborzati adottságoktól függően.
Jeladók
Számtalan állatfajtára fejlesztettünk már jeladót, különféle rögzítési megoldásokkal, mint pl. lepkére, sünre, pocokra, denevérre, széncinegére, egerészölyvre, sólyomra, harrisra, héjára, uhura, túzokra, kutyára, szarvasra, amelyek használhatóak az automatizált adatgyűjtő rendszerben.
Az automatizált rendszerben használható jeladók mérete akár extrém kicsi is lehet, elemmel együtt 0,16 g.
Programozhatóak az egyedi igényeknek megfelelően, hogy optimálisak legyenek a fogyasztás, üzemidő, teljesítmény és adatmennyiség tekintetében.
Különféle módokon rögzíthetők: ragasztással, hámmal, lábra, nyakörvbe rejtve stb. a megfigyelni kívánt állat adottságaihoz illeszkedően.
Ugyanazon a frekvencián több csatornán is képesek működni a jeladók, anélkül, hogy egymás adását zavarnák a digitális jelátvitelnek köszönhetően.
Sokféle adat gyűjthető, integrálható a jeladók rádiójelébe a kutatási céloknak megfelelően különféle MEMS szenzorok használatával:
- hőmérséklet
- nedvesség,
- gyorsulás,
- fény,
- mágnesesség stb.
ADATGYŰJTÉS, JELFELDOLGOZÁS
Adatgyűjtés
Az ARS rendszereknél elkülönül az adatgyűjtés (loggolás) és az adatkiértékelés, -feldolgozás folyamata. Ez teszi lehetővé, hogy az adott feladatnak megfelelő komplex rendszert lehessen kiépíteni. Mivel az ARS egyidejűleg több különféle típusú adat gyűjtését is lehetővé teszi, a fenti elvnek köszönhetően lehetővé válik a különböző típusú adatok egy fájlban történő tárolása. A natív adatok a későbbiekben több szempontból is kiértékelhetők a későbbi kutatási szempontoknak megfelelően.
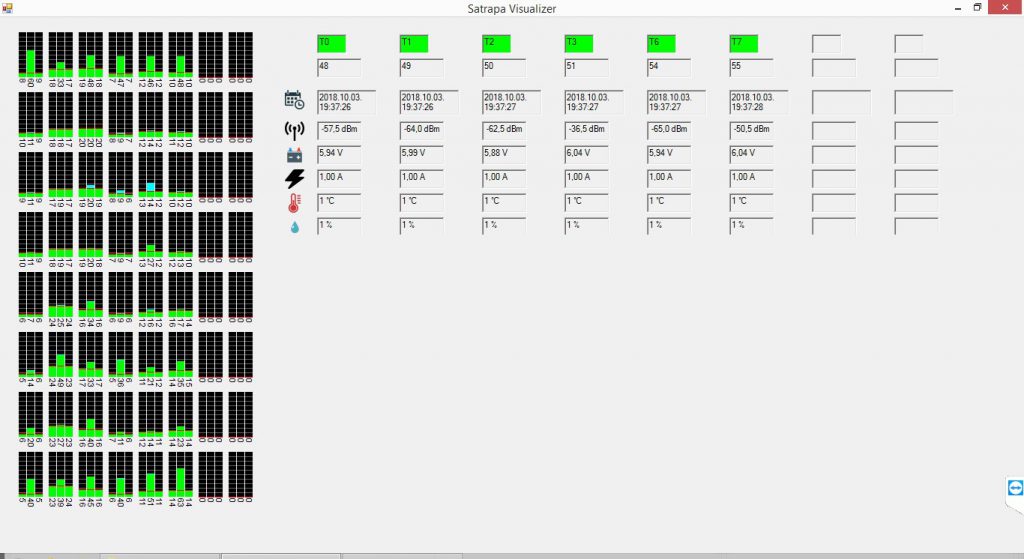
Az adatgyűjtő és megjelenítő szoftver megjeleníti a valós idejű rendszerstátusz-információkat, a vevőegységek által vett jelek erősségét és egyéb mért paramétereket (hőmérséklet, nedvesség stb.), amint az az alábbi képernyőnézeten is látható. (Ehhez nem szükséges előzetesen semmit beállítani.)
Jelfeldolgozás
Alapesetben az adatok elemzésére utólag van lehetőség, amire MATLAB alapú célszoftvert tartjuk a legjobb megoldásnak, amelyek szofisztikált adatelemzést tesznek lehetővé. Az újabb fejlesztéseinknek köszönhetően készítünk olyan adatelemző szoftvert is, ami az adatgyűjtő szoftverrel kommunikál LAN vagy WAN hálózaton, és valós időben megjeleníti a feldolgozott adatokat, amennyiben ez az igény.
Az utólagos adatelemzésnek két alapvető kimeneti típusa van:
- A megfigyelt állat mozgáspályájának (trajectory) meghatározása, ami a becsült pozíciók időben egymás után rendezésével áll elő.
- A megfigyelt állat által adott időintervallumban használt terület becslése. (Több területhasználati térkép segítségével látható, hogyan változik időről-időre a területhasználat egy adott egyed esetén egy vizsgálati időszakban.)
A pozícióbecslés 3 módszerre épülhet:
- Fizikai modellen alapuló,
- kalibráción alapuló és
- a fenti kettő módszert ötvöző.
1. A fizikai modell figyelembe veszi pl. a vevőegységek helyzetét, a környezeti paramétereket (növényzet, domborzati adottságok), és a jeladók földrajzi pozíciója és a vett jel erőssége közötti összefüggés vizsgálatán alapul. Ez a módszer kevésbé pontos becslést ad, ha összetett a környezet, azaz a megfigyelési terület domborzati viszonyai és növényzete változatos.
2. A kalibráción alapuló pozícióbecslés alapja, hogy a rendszer telepítését követően a vizsgálati területet be kell járni egy kalibráló készülékkel, és az ezáltal sugárzott és a vevőegységek által vett jeleket a kalibráló adó aktuális pozíciójával (amit egy GPS segítségével rögzítünk) rendeljük össze. Ha egy kellően részletes adatbázist készítünk ezzel a módszerrel, akkor ezek alapján a később a vevőegységek által az állatok jeladójából vett jelek forrásának helye ezzel az inverz módszerrel meghatározható. (Ez a módszer akkor javasolható, ha csak RSS alapú vevőegységet használunk.)
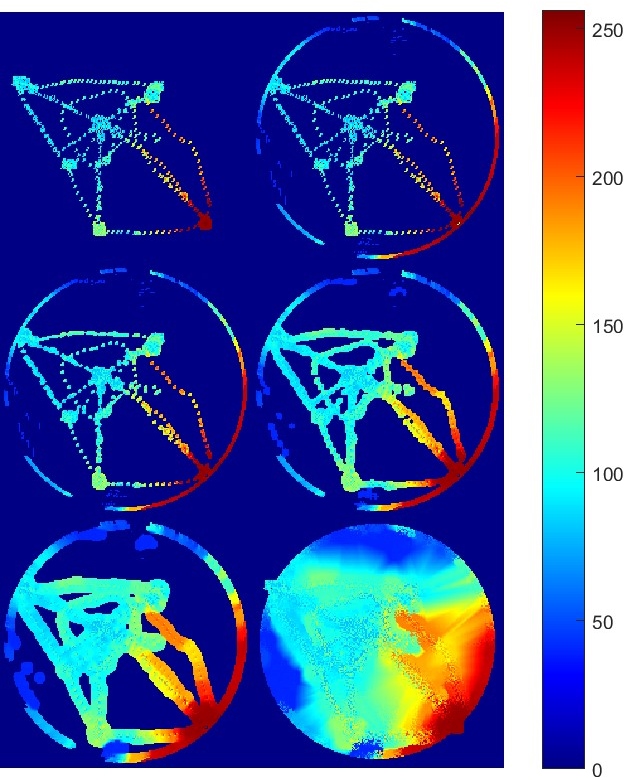
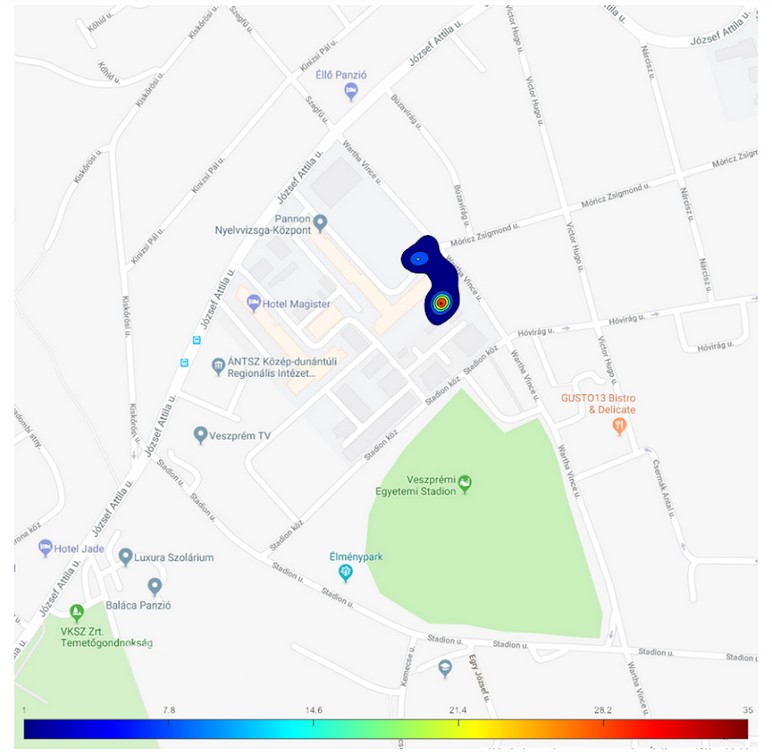
Az alább egy kalibrációs térkép látható a Pannon Egyetem vizsgálati területéről (Széncinegék vizsgálata a Pannon Egyetem Limnológiai Intézete kutatása alkalmával 2017-ben, kutatásvezető: dr. Liker András)

Egy speciális intra- és extrapolációs eljárás segítségével hozzuk létre a felvett pontok alapján minden egyes mérőtoronyra vonatkozóan a kalibrációs térképet, amely alapján a későbbiekben az egyes jeladók helyét meghatározzuk. Az alábbi ábrán ennek lépéseit láthatjuk.
Széncinege nappali területhasználatát mutatja a lenti térkép, amely kalibrációs módszeren alapuló pozícióbecsléssel készült. A különböző színek a jeladóval megjelölt egyed adott helyen történő előfordulásának százalékát mutatják. (A veszprémi Egyetem Limnológiai Intézetének kutatása, kutatásvezető: Dr. Liker András)
A vevőegységek natív adataiból is már számos következtetés levonható, amit az alábbi két ábra szemléltet.
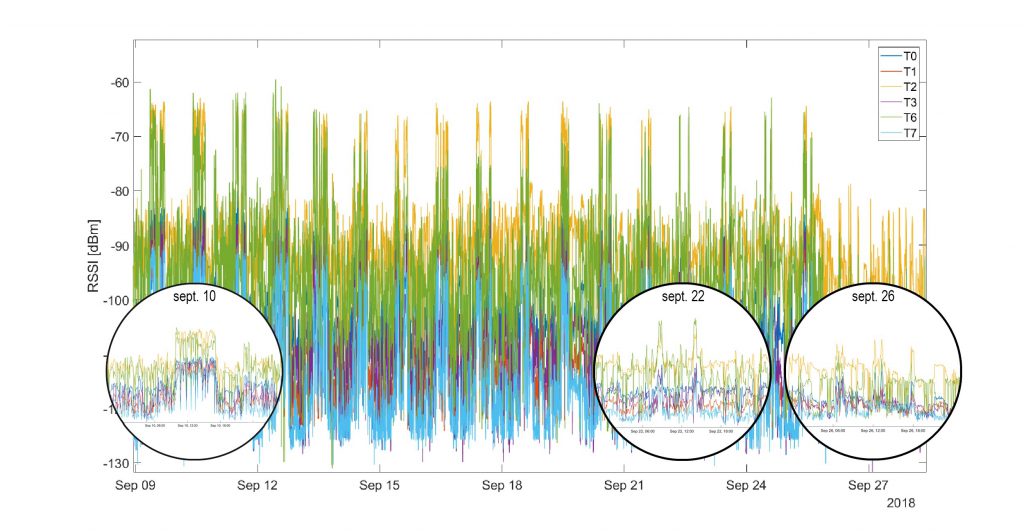
A grafikonon alapján látható, hogy a megfigyelt kisemlős szeptember 10-én nappal még hosszabb ideig aktív volt, szeptember 22-én viszont már csak a reggeli és késő délutáni időszakban volt aktív. (Ürgék újratelepítése és nyomkövetése kutatási projekt Kisoroszi mellett, 2018 nyarán)
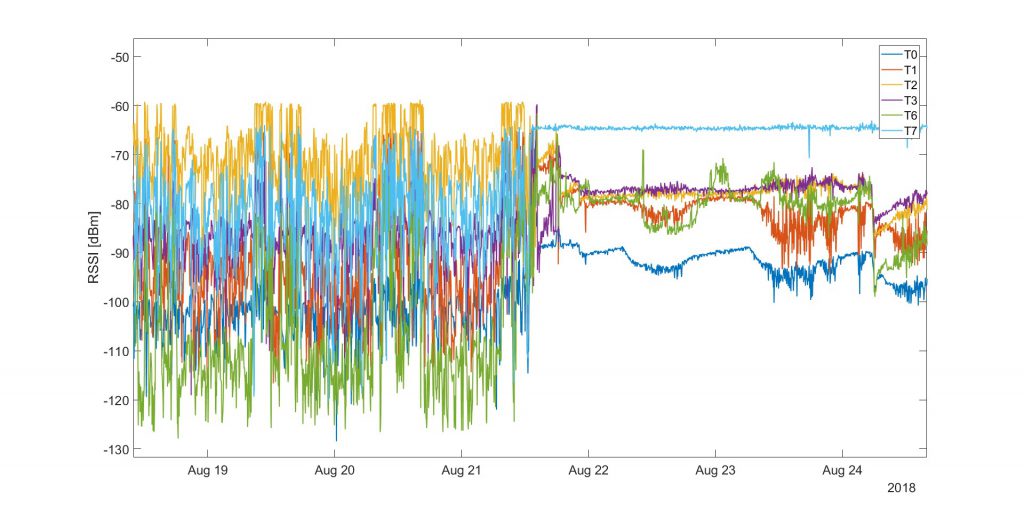
A grafikonról leolvasható a megfigyelt kisemlős elpusztulása augusztus 22-én. (Ürgék újratelepítése és nyomkövetése kutatási projekt Kisoroszi mellett, 2018 nyarán).
Lehetséges továbbá például Google Mapsen ábrázolni a vizsgált állat mért pozíciói, ahogy azt az alábbi ábra mutatja.
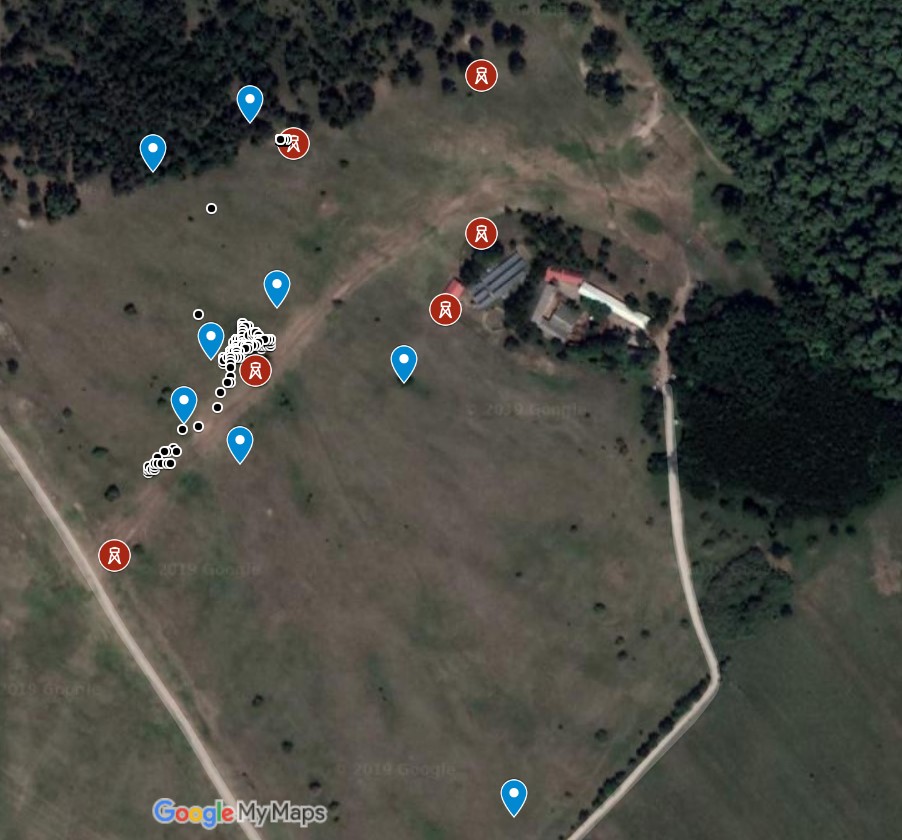
Egy ürge területhasználatát mutató Google térkép. Fekete pontokkal vannak jelölve az ürge mért pozíciói, pirossal a telepített vevőegységek, kékkel pedig a többi megjelölt ürge utoljára mért pozíciói. (Ürgék újratelepítése és nyomkövetése 2018 nyarán Kisoroszi mellett; kutatásvezető: Prommer Mátyás, Revír Nonprofit. Kft.)
PÉLDÁK AZ ARS HASZNÁLATÁRA
Egyes állatok viselkedésének kutatása a mozgás mintázatának meghatározása céljából: az akár 1 másodpercenkénti jelsűrűségnek köszönhetően a megfigyelt állatok esetén rövidebb és hosszabb idejű mozgásokat, viselkedési jellemzőket is nagyon nagy felbontással vizsgálhatunk. (Például napi mozgásritmusok jellegzetességei, időbeli eltolódása, viselkedés megváltozása a szaporodási/költési/ellési időszakban stb.)
Külső tényezőknek az állatok viselkedésére, mozgására gyakorolt hatásának vizsgálata (úgy mint pl. világos órák számának változása, időjárási ingadozások, egyes mezőgazdasági tevékenységek, vadászat stb. hatása).
Állatok közötti interakció vizsgálata: az egyidőben sok állathoz tartozó jel vételének és feldolgozásának és a nagy időbeli felbontásnak köszönhetően megfigyelhető, ha például több állat egy helyen tartózkodik, ha közelednek egymáshoz, vagy távolodnak egymástól.
Objektumokhoz rendelhető vizsgálatok: néhány konkrétan meghatározott objektum (vadles, etető, kotorék, dagonya, gazdasági épület stb.) közelében az előfordulás gyakoriságának és valós idejének megállapítása.
Bizonyos jól meghatározott határvonalak (pl. ültetvények határai, kerítések, erdő-mező határa, lakott terület határa stb.) átlépésének precíz vizsgálata időben és térben.
Rögzített paraméterek változtatása esetén hogyan változik az állatok mozgása.